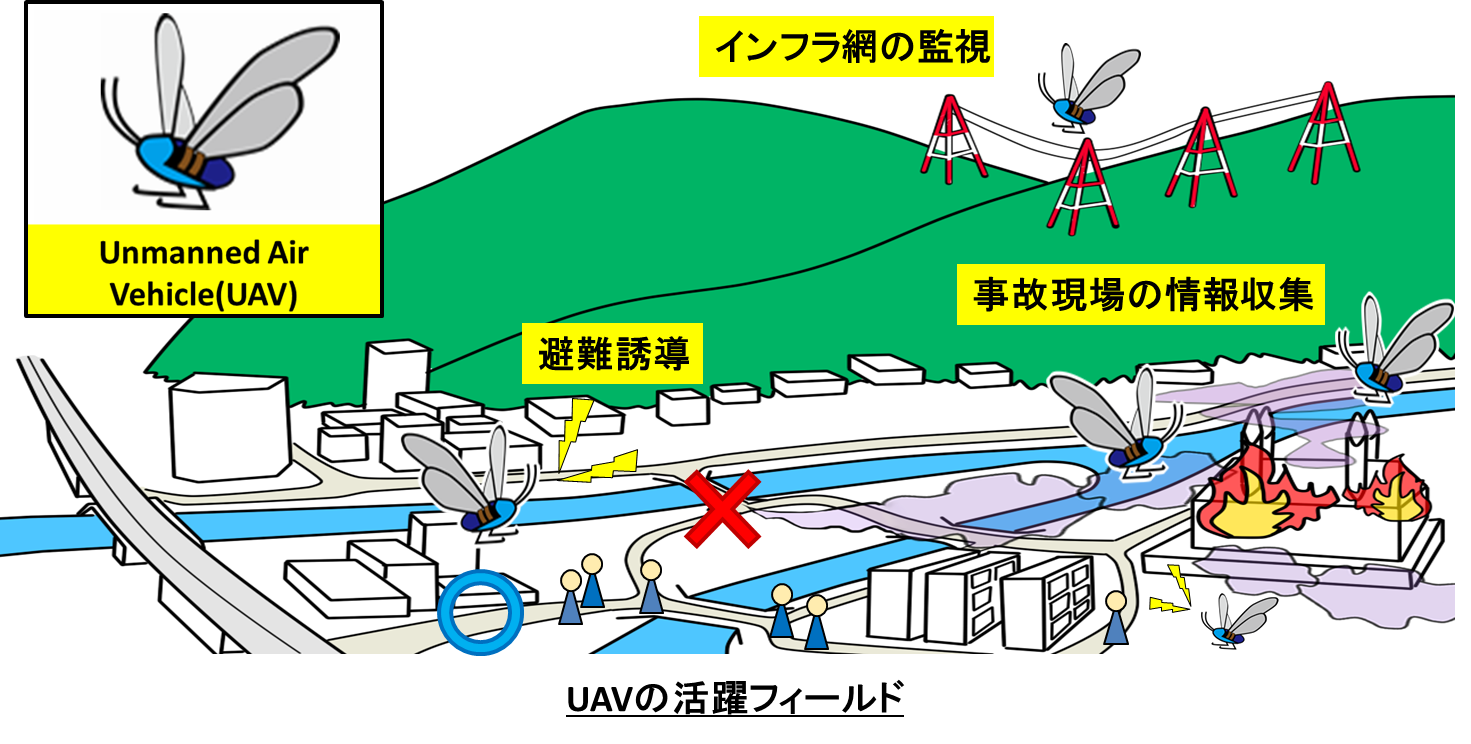
人が立ち入ることが難しい災害現場のリアルタイム情報収集や、インフラ網の効率的な監視を目的として、小型の無人飛翔体(Unmanned Air Vehicle; UAV)の研究開発が盛んに行われています。特に、羽ばたき型UAVは、ホバリング、宙返り、急旋回など、現実の飛翔生物が有する高い飛行性能を再現できる可能性があることから、その実現に大きな期待が寄せられています。
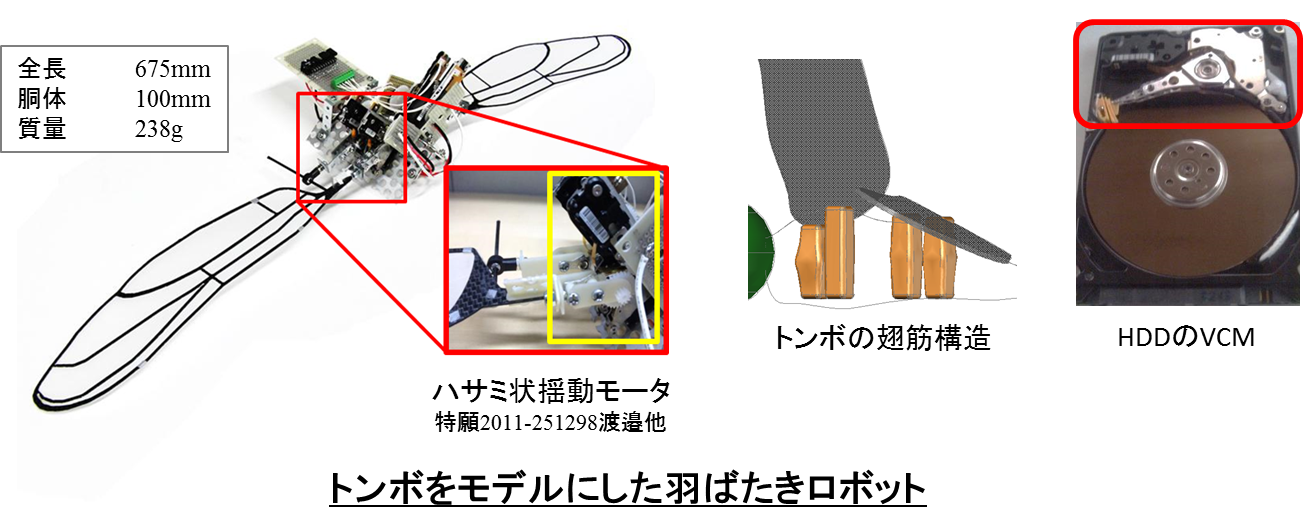
当グループでは、トンボにモチーフにした羽ばたきロボットを作製しています。トンボの翅1枚は複数の筋肉で駆動されており、単純な羽ばたき動作に加えて翅を捻る動作をすることもできます。当グループでは、HDDのボイスコイルモータ(VCM)を組み合わせた 「ハサミ状揺動モータ」でトンボの飛翔筋の機能を再現しました。 クランクで再現した羽ばたき機構には難しかった、羽ばたき振幅・周波数・翅のひねり角度の自在な制御が可能です。
現在、自律飛翔する羽ばたきロボットの実現を目指した、以下の研究に取り組んでいます。
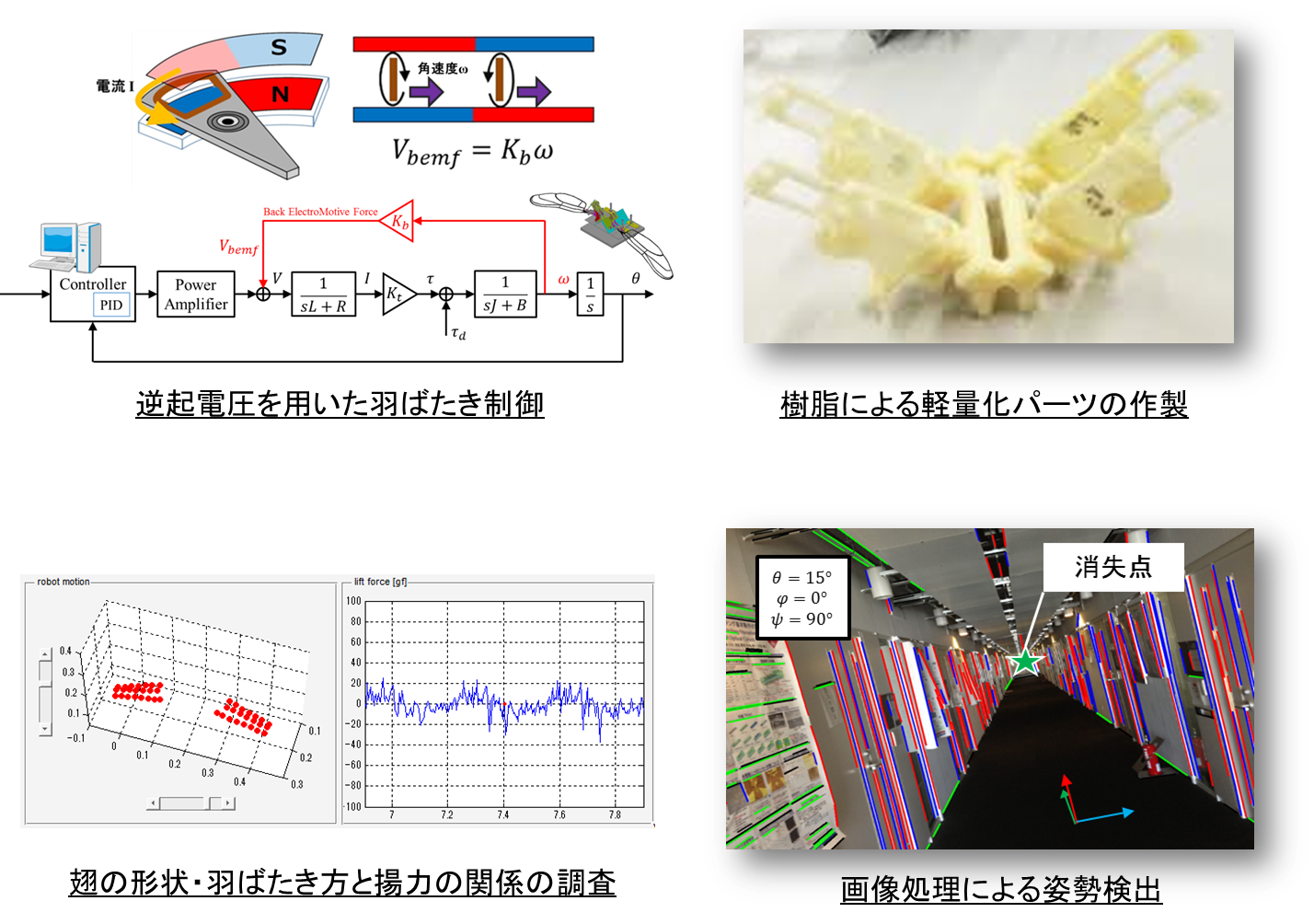
・羽ばたき動作の制御
・機体の軽量化
・翅の形状や羽ばたき方と揚力の関係の調査
・ロボットビジョン